2024-Now |
Robotics Meets Art: Contemporary Art Upgrade and Maintenance
Project: Old People's Home Link
Collaborators: Hong Kong M+ Museum
Link
|
2024-2025 |
Iterative Shaping of Multi-Particle Aggregates based on Action Trees and VLM
Publication: IEEE Robotics and Automation Letters (RA-L), 2025 [paper]
Authors: H.-Y. Lee, P. Zhou, A. Duan, C. Yang, and D. Navarro-Alarcon.
|
2024-2025 |
LLM-Driven Symbolic Planning and Hierarchical Imitation Learning for Long-Horizon Deformable Object Assembly
Publication: Robotics and Computer-Integrated Manufacturing (RCIM), 2026 [paper]
Authors: J. Qi, L. Lu, F. Wang, H.-Y. Lee, D. Navarro-Alarcon, and Zeqing Zhang.
|
2023-2024 |
Non-Prehensile Tool-Object Manipulation by Integrating LLM-Based Planning and Manoeuvrability-Driven Controls
Tool use was once thought to be unique to humans, but many animals, such as crows, also demonstrate this ability, while robots still struggle to match biological dexterity. In this work, we study how Large Language Models (LLMs), tool affordances, and object manoeuvrability can be leveraged for non-prehensile tool-based manipulation.
Publication: Robotics and Computer-Integrated Manufacturing (RCIM), 2026 [paper]
Authors: H.-Y. Lee, P. Zhou, A. Duan, W. Ma, C. Yang, and D. Navarro-Alarcon.
|
2023-2024 |
Learning to Hang Crumpled Garments with Confidence-guided Grasping and Active Perception
Publication: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 [paper]
Authors: S. Huo, H. Zhang, H.-Y. Lee, P. Zhou, H. Wang, and D. Navarro-Alarcon.
|
2023-2024 |
Human-Aware Reactive Task Planning of Sequential Robotic Manipulation Tasks
Publication: IEEE Transactions on Industrial Informatics (T-II) (in-press), 2024 [paper]
Authors: W. Ma, A. Duan, H.-Y. Lee, P. Zheng, and D. Navarro-Alarcon
|
2022-2023 |
PSO-Based Optimal Coverage Path Planning for Surface Defect Inspection of 3C Components with a Robotic Line Scanner
Publication: IEEE Transactions on Instrumentation and Measurement (T-IM), 2025 [paper]
Authors: H. Chen, S. Huo, M. Muddassir, H.-Y. Lee, A. Duan, P. Zheng, H. Pan, D. Navarro-Alarcon.
|
2022-2023 |
Reactive Human-Robot Collaborative Manipulation of Deformable Linear Objects Using a New Topological Latent Control Model
Publication: Robotics and Computer-Integrated Manufacturing (RCIM), 2024 [paper]
Authors: P. Zhou, P. Zheng, J. Qi, C. Li, H.-Y. Lee, A. Duan, L. Lu, Z. Li, L. Hu, D. Navarro-Alarcon.
|
2021-2022 |
Robust Grasping by Bimanual Robots with Stable Parametrization-Based Contact Servoing
Publication: IEEE/ASME Transactions on Mechatronics (T-MECH), 2024 [paper]
Authors: A. Duan, S. Huo, H.-Y. Lee, P. Zhou, J. G. Romero, C. Yang and D. Navarro-Alarcon.
|
2021-2022 |
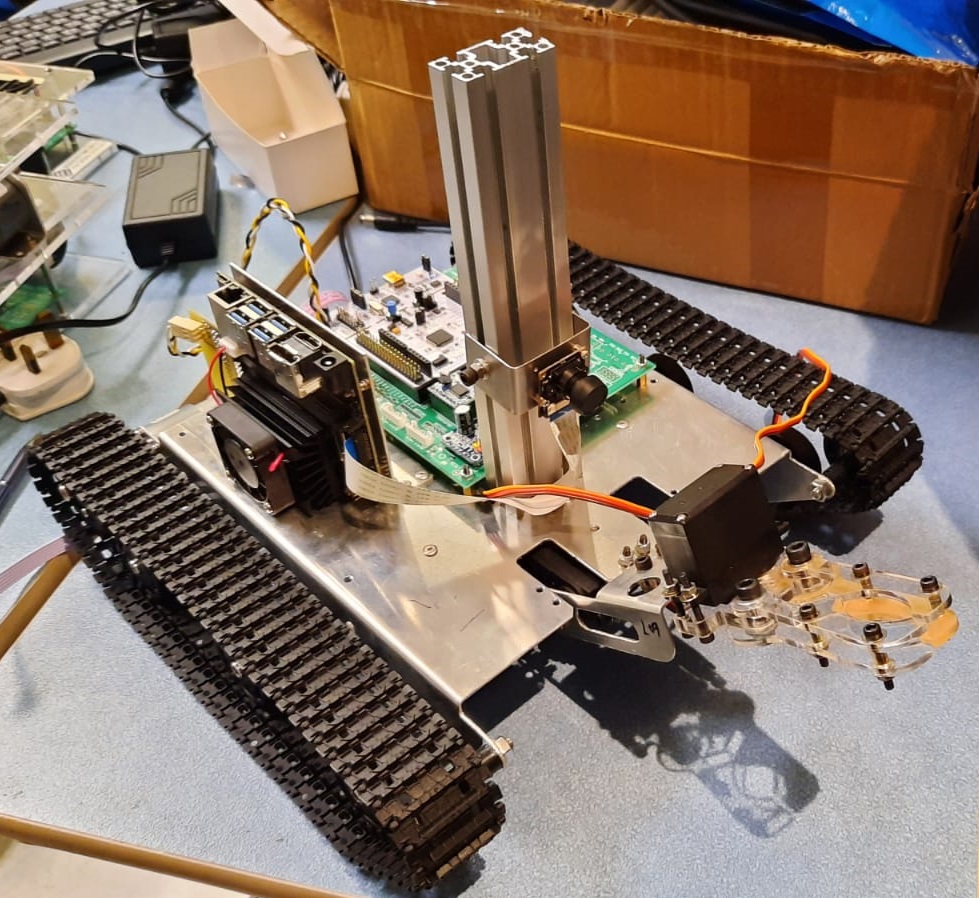
A Distributed Dynamic Framework to Allocate Collaborative Tasks Based on Capability Matching in Heterogeneous Multi-Robot Systems
Human Collaboration can boost task efficiency and accomplish challenging missions. But what if robotss collaborate?
Different types of robots can work together without human intervention. Can robot teams reach the same performance as humans?
Main Focus:
- Dynamic task allocation
- Decentralized multi-agent system based on their own capabilities
- Self-reconfigure, gather, and assemble
Publication: IEEE Transactions on Cognitive and Developmental Systems (T-CDS) (in press), 2023 [paper]
Authors: H.-Y. Lee, P. Zhou, B. Zhang, L. Qiu, B. Fan, A. Duan, J. Tang, T. L. Lam, and D. Navarro-Alarcon.
|
2021-2022 |
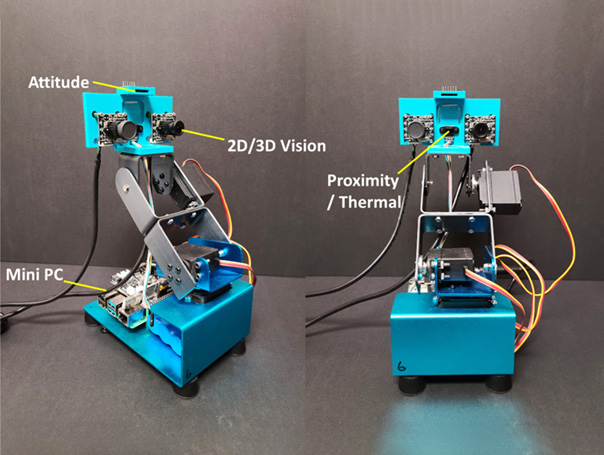
A Multi-Sensor Interface to Improve the Teaching and Learning Experience in Arc Welding Training Tasks
Welding acquires hand-eye welding coordination skills are typically conducted through one-to-one instruction.
Traditional methods of training are inefficient and make it hard to learn.
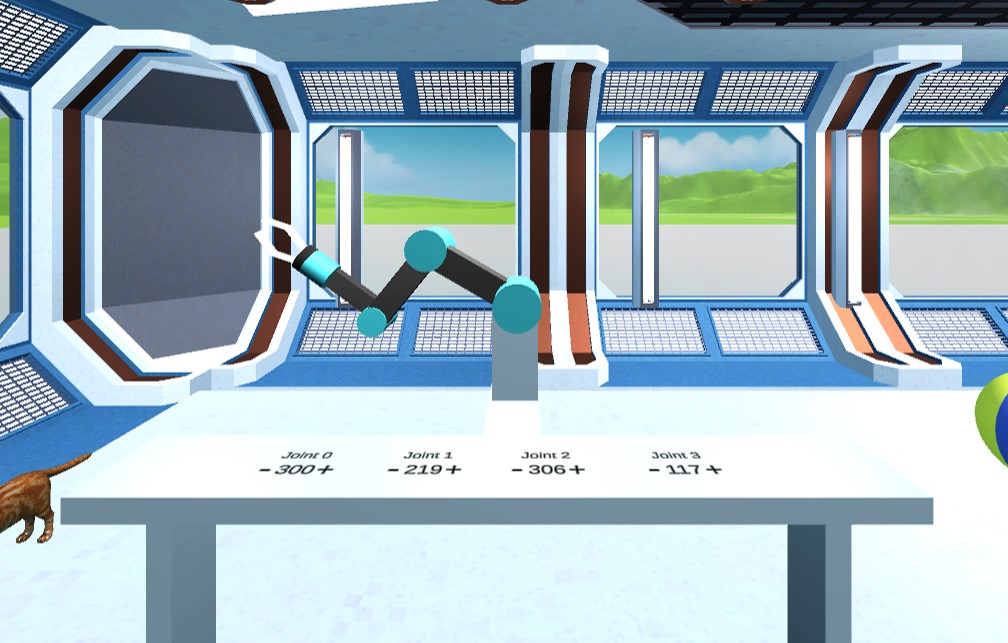
We present a new automated multi-sensor extended reality platform for arc welding training, providing trainees with a “bot trainer”.
This system provides real-time virtual cues of the seam geometry, automatic spot tracking, and a performance score.
Publication: IEEE Transactions on Human-Machine Systems (T-HMS) (in-press), 2023 [paper]
Authors: H.-Y. Lee, P. Zhou, A. Duan, J. Wang, V. Wu, and D. Navarro-Alarcon.
Presentation: Link
|
2021-2022 |
Self-Reconfigurable Soft-Rigid Mobile Agent with Variable Stiffness and Adaptive Morphology
Publication: IEEE Robotics and Automation Letters (RA-L), 2023 [paper]
Authors: L. Labazanova, S. Peng, L. Qiu, H.-Y. Lee, T. Nanayakkara, and D. Navarro-Alarcon.
|